Pathfinding Rover Project
About this project
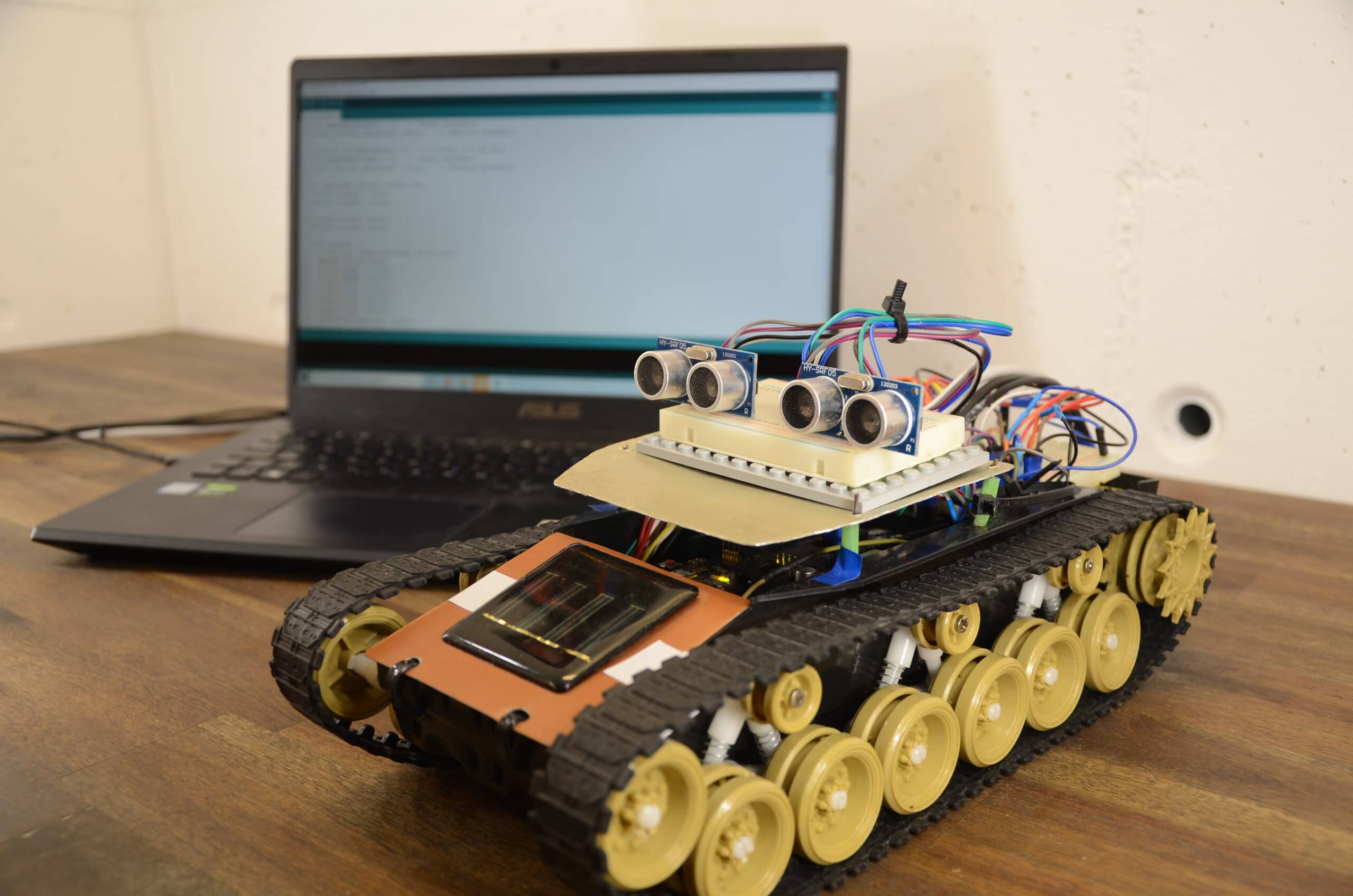
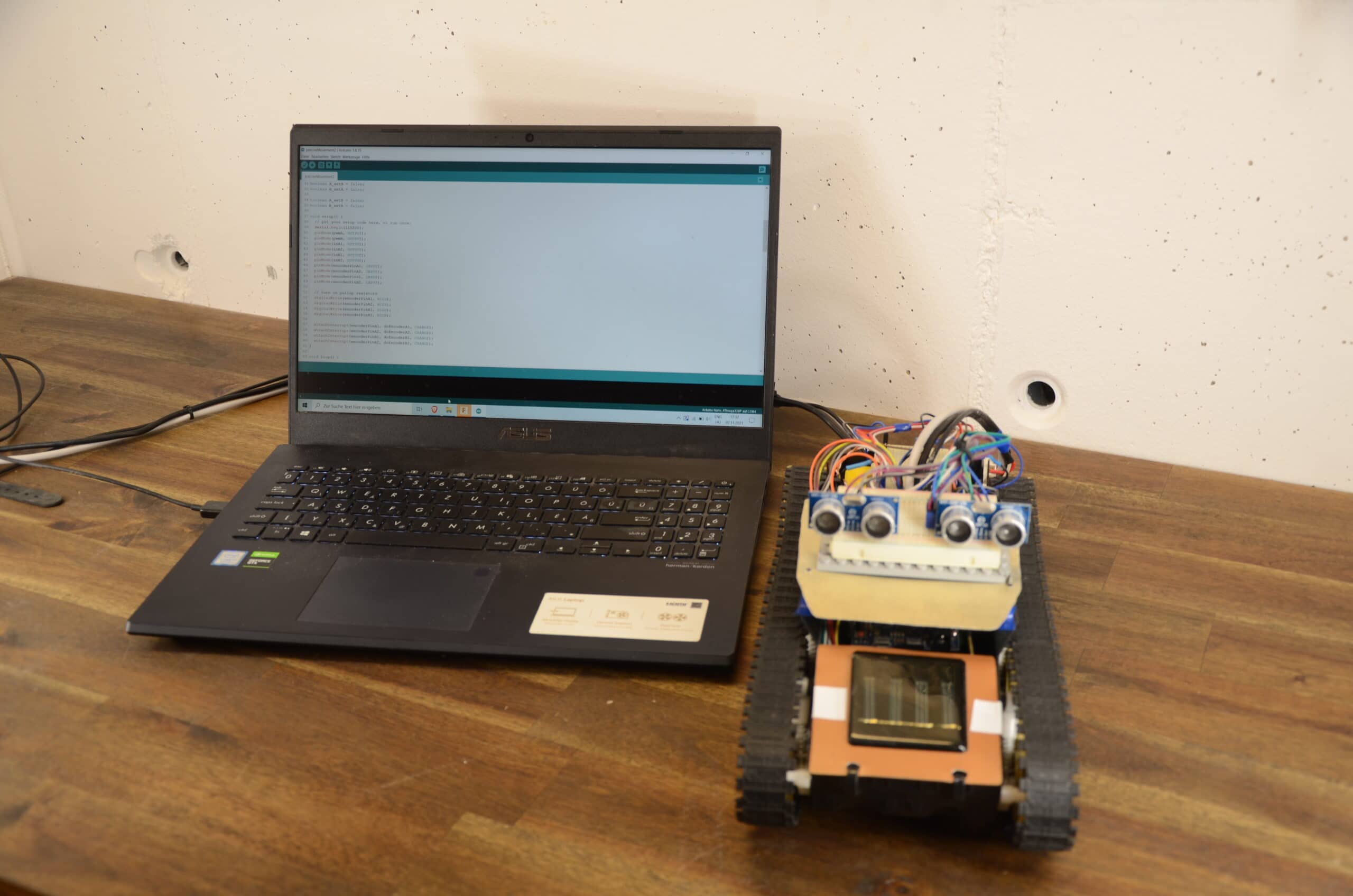
This project featured a rover with advanced terrain maneuvering capabilities which was developed between 2017 and 2019. The project served as an introduction to work with embedded systems, specifically working with the Arduino platform and interfacing with digital sensors. Together with the rover, a Java-based desktop control interface was developed, which could be used to control the rover directly or to compile a route based on a map. If a new obstacle was detected during the execution of the path, the map and route were updated automatically.
System and software specifications
-
Microcontroller
Arduino DUE with the Atmel SAM3X8E ARM Cortex-M3 CPU running at 3.3.V.
-
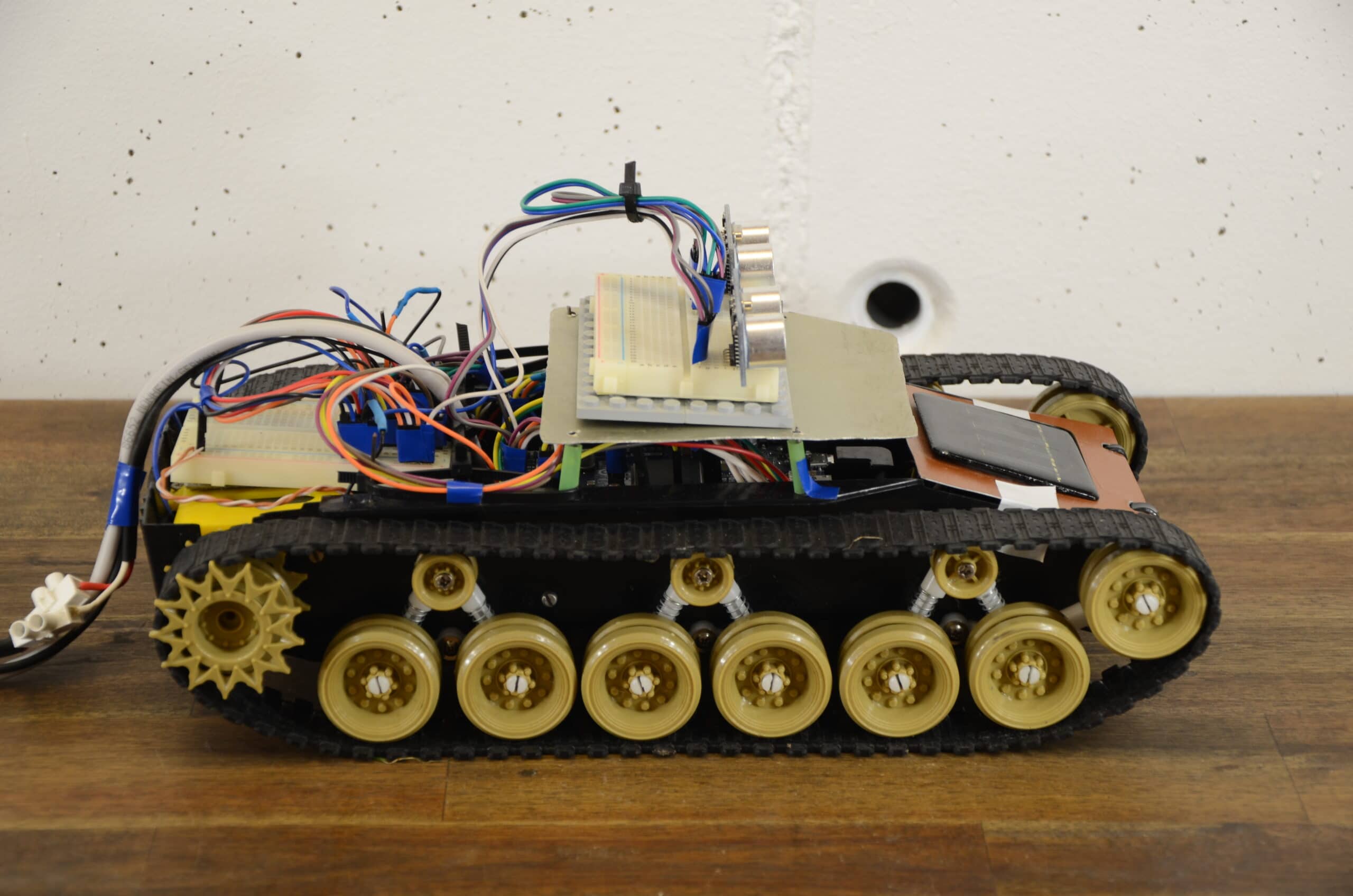
Motors
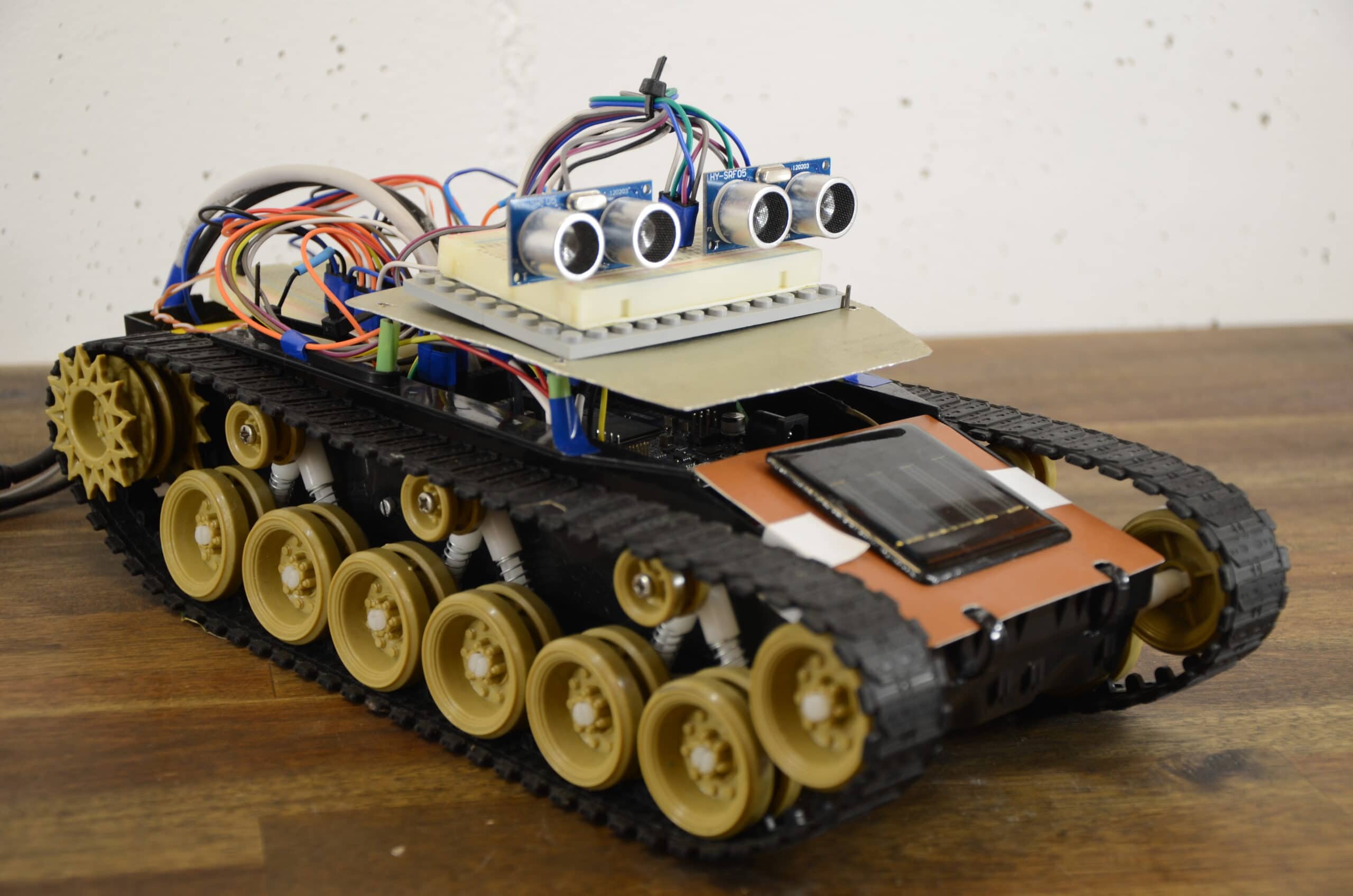
2x geared JGY-370 12V motors with high sensitivity rotary encoders for accurate speed and distance calculation.
-
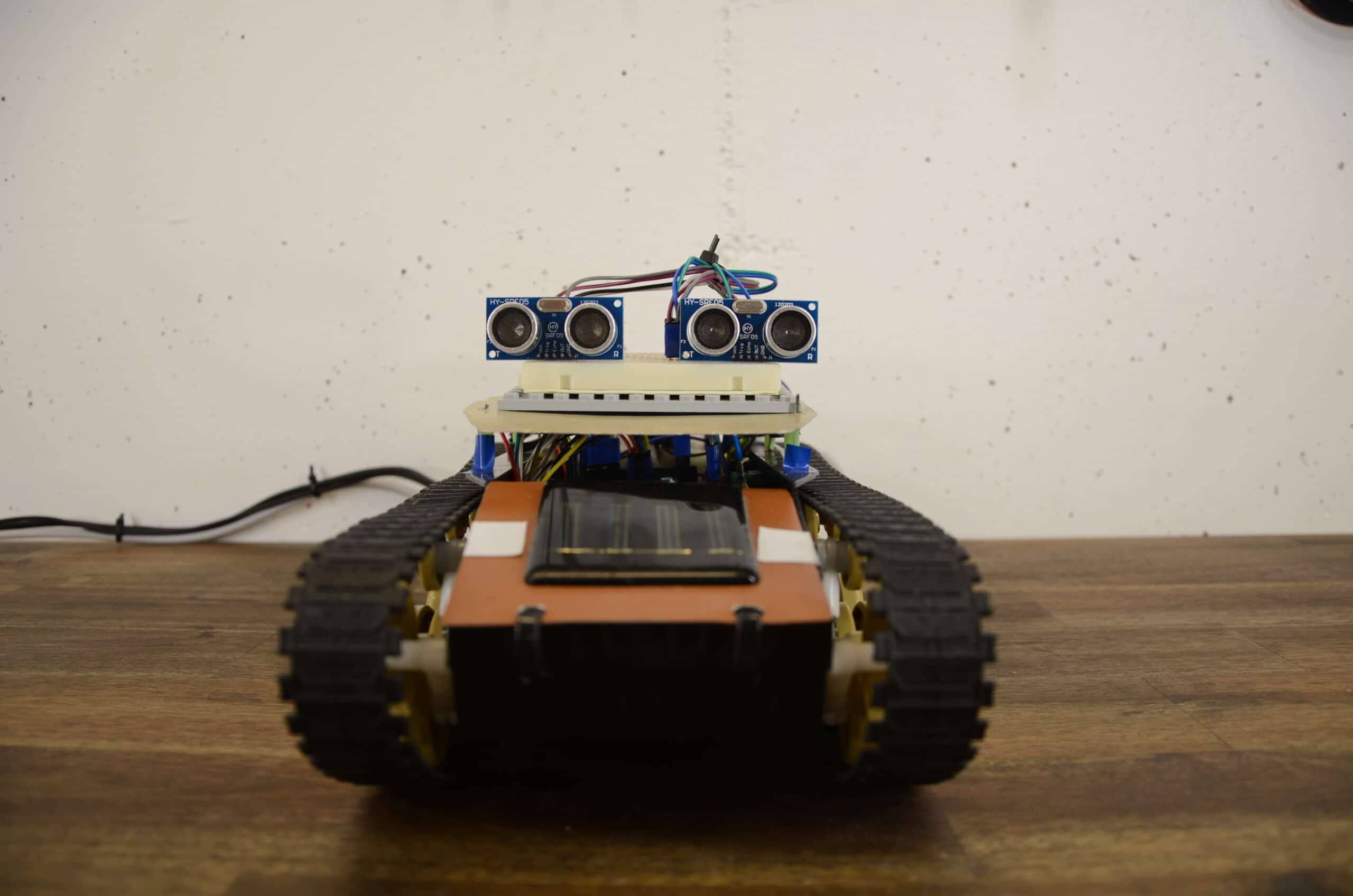
Vision
Stereo SRF05 ultrasonic depth sensor system for accurate object detection.
-
Communication
Serial via USB with capability for network based TCP/IP communication via UTP cable.
-
Software
Microcontroller programmed in C++ communicating with a Java-based desktop control interface.
Gallery